10th Conference on
Field and Service Robotics (FSR)
June 24-26, 2015
Toronto, Canada
|
Welcome to the home page for FSR 2015, the Tenth Conference on Field and Service Robotics. FSR is a single track conference with a specific focus on field and service applications of robotics technology. The goal of FSR is to report and encourage the development of field and service robotics. These are non-factory robots, typically mobile, that must operate in complex and dynamic environments. Typical field robotics applications include mining, agriculture, building and construction, forestry, cargo handling and so on. Field robots may operate on the ground (of Earth or planets), under the ground, underwater, in the air, or in space. Service robots are those that work closely with humans, importantly the elderly and sick, to help them with their lives. A book version of the Conference Proceedings will be published by Springer-Verlag in their STAR series and selected field robotics papers will be considered for publication in a Special Issue of the Journal of Field Robotics. |
 FSR 2015 is now over.
FSR 2015 is now over. See you in Switzerland in 2017! |
Important Dates
| Paper submission | ||
| Acceptance/rejection notification | ||
| Early registration end | ||
| Revised camera-ready papers | ||
| Conference |
Sponsors



![]()
What will happen at FSR 2015?

We have 42 papers lined up from a broad range of field robotics applications including unmanned aerial vehicles, space exploration, self-driving cars, and many aquatic applications. Our 4 excellent keynote speakers are:
- “Realizing Self-Driving Vehicles” — Chris Urmson, Google[x]
- “Fielding Robots with Learnt Place-Specific Excellence” — Paul Newman, Oxford
- “As the Drone Flies: The shortest path from ground to aerial autonomy” — Sanjiv Singh, CMU
- “The Evolution of a Robotics Company” — Ryan Gariepy, Clearpath Robotics

There will be a number of social events during the conference. A first dinner will be held on a 144-feet long ship reserved exclusively for the occasion. Through the cruise, participants will be able to enjoy few drinks on the upper deck, while appreciating a scenic view of Toronto Harbour from a unique perspective. The next day, the conference banquet dinner will be hosted in the Trinity College's Strachan Hall. With its oak-panelled walls, cathedral ceiling, chandeliers, and long wooden tables, the Strachan Hall will, for sure, be a perfect location to start a good discussion, while savoring a fine meal. The last day will include a technical tour and demos at the University of Toronto Institute for Aerospace Studies. Ground and aerial vehicles will be presented in action giving the participants the opportunity to ask questions and interact with the systems.
Register now!
Top 5 reasons to submit your work at FSR
There are many calls for participation out there, and your original work is solicitated by many conferences. For our call for papers, we used a different approach by answering directly to the question: Why should I participate to the 10th International conference on Field and Service Robotics? Most of the good reasons are well known by senior scientists who are familiar with the conference, but we took the opportunity to list them here for a broader community.

Here are our top five reasons to submit your work to FSR:
-
Real-world robotic applications.
Deploying robots in the field takes time, which is why the FRS conference occurs only every second year. The conference is definitively the best place to see robots having a hard time in the field, and to discuss with experts providing unusual lessons learned. Your real-world experience is welcome, and scratches are expected! -
A fully attentive audience.
The conference is single track, so no side distraction is going on during your presentation. Also, many senior professors are regular attendees, meaning that leading scientists will be there to listen to your talk. -
Fair reviews from experts.
We make sure that a minimum of two reviews per submission are provided to the authors. The reviewers are mainly selected from our International Program Commitee, which is composed of regular FSR attendees. -
An access to the most cited field robotics journal.
Selected field robotics papers will be considered for publication in a Special Issue of the Journal of Field Robotics. Moreover, the Conference Proceedings will be published by Springer-Verlag in their STAR series. -
Visiting Canada!
Toronto is the most populous city of Canada and offers tons of social and cultural activities, especially during summer. A good public transit system composed of metro, streetcars (trams), and buses will ease your discovery of the city. The city also has an enormous diversity (47% of its population being from a visible minority), which brings a beautiful palette of food, music and festivals. Furthermore, the Canadian wilderness is accessible within only two hours of driving!
Official Announcement
To print and advertise in your lab, download this announcement as as PDF:
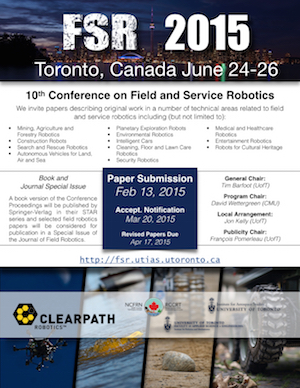
We invite papers describing original work in a number of technical areas related to field and service robotics, including:
- Mining, Agriculture and Forestry Robotics
- Construction Robots
- Search and Rescue Robotics
- Autonomous Vehicles for Land, Air and Sea
- Planetary Exploration Robots
- Environmental Robotics
- Intelligent Cars
- Cleaning, Floor and Lawn Care Robotics
- Security Robotics
- Medical and Healthcare Robotics
- Entertainment Robotics
- Robots for Cultural Heritage (Museums and Galleries, etc)
as well as related technologies.
Guideline for Paper Submission
For the publication by Springer-Verlag in their STAR series, we strongly encouraged you to use LaTex. You can find the templates below:
- LaTex template
- MS Word template (updated) - Please read the instructions guide readme-T1-book.pdf before starting. You will need to activate macros and use the appropriate styles defined in the Add-Ins tab.
Initial Submission
We are using EasyChair as conference management system. Follow this this link to submit your paper and click on New Submission in the menu bar.
Submission portal:

Camera-Ready Submission
On top of resolving reviewers conserns, please carefully proofread your document and ensure that all your figures are readable (e.g., graph font size not smaller than the caption). When your final version is ready, follow those instructions on EasyChair.
- Login as an Author on EasyChair
- In My Submissions tab, select your submission ID that was accepted.
- In the in the upper right corner, select Update file.
- Choose your new file to upload and click Submit.
Presentations
Oral Presentations
There is a total of 20 minutes available per talk. You should aim for a 15-min long presentation to allow a question period of 5 min. The next speaker will be asked to come on stage to prepare his laptop during the last 2 min of questions. Any presentations exceeding the available time will be cut to stay on schedule.Poster Session
The poster sension will be on Thursday, June 25, at 10:30. Posters will be installed in the same room as the coffee breaks and the lunches take place. You will have access to a poster board, which is 6 feet wide x 3 feet tall (182 cm x 91 cm), a high table and a power outlet. Your poster should not be larger than the poster board and be large enough to allow multiple people to read it at the same time. The total time for the poster session will be 1:30, which can be extended during lunch time. There won't be any screens installed by the conference staff, so you need to print and bring your own poster.Keynote Speakers

Chris Urmson
|

Paul Newman
|

Sanjiv Singh
|

Ryan Gariepy
|
Quick link to:
Venue
•
Hotels
•
Sightseeing
Conference Venue
- Wednesday to Friday -
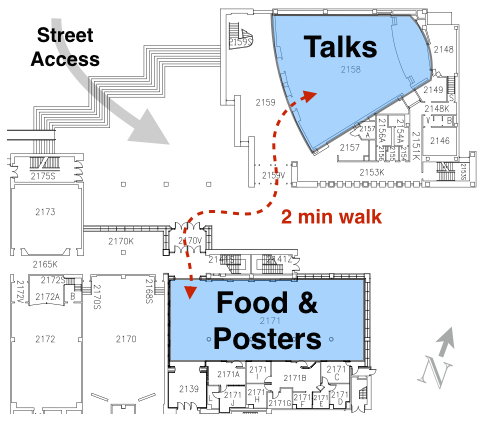
The conference will take place on the main campus (St-George) of the University of Toronto, right in the middle of the downtown area. The presentations will be held in the JJR Macleod Auditorium, while the food and posters will be in another room named the Stone Lobby. Here is the link to Google Map and a detailed map of the rooms:
Hotels
We could negociate preferential prices for conference attendees. If you have any problems with the instructions or the booking, please contact directly Jonathan Kelly (jkelly@utias.utoronto.ca).
| Name and Contact | Room | Price |
|---|---|---|
| New College Residences | ||
| newcollege.groups@utoronto.ca | Student (single occupancy) | $43.00 CAD a night |
| 416-946-5317 (phone) | Non-student (single occupancy) | $45.00 CAD a night |
| 416-946-3801 (fax) | Student (double occupancy) | $60.00 CAD a night |
| Non-student (double occupancy) | $70.00 CAD a night | |
| Plus 13% tax. | ||
| To make a booking: conference attendees can go to the website above, click the link on the main page to Book a Room, and then fill out the reservation form, scan it, and email or fax it back. In the “Where did you hear about us?” box on the form, the attendee should indicate “2015 Conference Field & Service Robotics”. Any questions can be directed to Aldo Sdao (information above). New College has both wired (Ethernet cable required) and wireless Internet access available for guests. Booking by April 23 is best. | ||
| Knox College | ||
| knox.residence@utoronto.ca | Student | $45.00 CAD a night |
| 416-978-0168 (phone) | Non-student | $55.00 CAD a night |
| Plus 13% tax. | ||
| To make a booking: conference attendees can go to the website above, click the link on the main page to Book a Room, and then fill out the reservation form, scan it, and email or fax it back. In the “Where did you hear about us?” box on the form, the attendee should indicate “2015 Conference Field & Service Robotics”. Any questions can be directed to Aldo Sdao (information above). New College has both wired (Ethernet cable required) and wireless Internet access available for guests. Booking by April 23 is best. | ||
| Park Hyatt | ||
| biljana.brunning@hyatt.com | Park Room | $199.00 CAD a night |
| 416-324-1468 (phone) | Park deluxe Room | $249.00 CAD a night |
| 416-324-1468 (phone) | Park Suite | $319.00 CAD a night |
| Plus 16% tax. | ||
| To make a booking: conference attendees should contact Biljana Brunning directly (email or phone above). Mention the “2015 Conference on Field and Service Robotics” and the association with the University of Toronto to get the preferred room rate. The UofT preferred room rates cannot be guaranteed - it depends on what is available at the time of booking. | ||
| Holiday Inn Toronto Bloor Yorkville | ||
| sonia.waite@whg.com | One Queen bed (1-2 persons) | $129.99 CAD a night |
| 416-968-3300 ext.: 1520 (phone) | One Queen bed (3 persons) | $134.99 CAD a night |
| 416-968-0010 (front desk) | One Queen bed (4 persons) | $139.99 CAD a night |
| Two Double beds (1-2 persons) | $134.99 CAD a night | |
| Two Double beds (3 persons) | $139.99 CAD a night | |
| Two Double beds (4 persons) | $144.99 CAD a night | |
| Plus 16% tax. | ||
| To make a booking: conference attendees should contact the hotel directly (front desk) and fill out and submit the attached booking form. Note the room rate are not guaranteed, and only apply to bookings made on or before May 23, 2015. | ||
| InterContinental Toronto Yorkville | ||
| 416-960-5200 (front desk) | ||
| To make a booking: this hotel is another option for conference attendees. There is no specific discount rate (beyond what’s available online), and it tends to be more pricey than the Park Hyatt (with the UofT preferred rate). | ||
Visiting Toronto
Here are some links to help you plan your visit:
And also few suggestions of places to see around the conference venue:







Photographs from F. Pomerleau
Registration
Prices:
FSR registrations are all-inclusive. This means you have access to: the conference, the electronic proceedings, the welcome reception (drinks and canapés), one (1) entrance to the banquet (drinks and dinner), one (1) entrance to the boat cruise (drinks and dinner), three (3) lunches, three (3) breakfasts and five (5) coffee breaks.
Early: Special registration prices end April 10, 2015.
Student: Undergraduate, Master's or PhD students registered in an official institution.
Extras:
Notes
- A minimum of one (1) registration per paper is required.
- Registration is required before submitting your revised camera-ready papers.
- The conference version of the papers will be posted online for fast access.
- All prices are in Canadian (CAD) dollars and include taxes.
The payment portal is closed.
Quick link to:
Tuesday
•
Wednesday
•
Thursday
•
Friday
Downloadable Materials
 |
All papers | A zip file containing all papers in PDF format. (218 MB) |
|
Digest | A PDF file containing maps, Wifi information, abstracts, etc. The dimension of the document is well-suited for mobile phones. |
Tuesday, June 23
Time |
Activity |
Note |
18:00-20:00 | Registration and opening reception (snacks and drinks) |
Wednesday, June 24
Time |
Activity |
Note |
8:00-8:30 |
Registration and breakfast |
Hall - JJR Macleod Auditorium |
8:30-8:50 | Conference Opening | JJR Macleod Auditorium |
Keynote 1 | JJR Macleod Auditorium | |
8:50-9:50 | Realizing Self-Driving Vehicles | Chris Urmson Director, Self-Driving Cars, Google[x] |
10:00-10:30 | Coffee break | Hall - JJR Macleod Auditorium |
Session 1: Aquatic 1 | Chair: Joshua Marshall | |
10:30-10:50 | Paper #20: A Spatially and Temporally Scalable Approach for Long-Term Lakeshore Monitoring | Shane Griffith and Cedric Pradalier |
10:50-11:10 | Paper #63: Autonomous Greenhouse Gas Sampling using Multiple Robotic Boats | Matthew Dunbabin |
11:10-11:30 | Paper #39: Experimental Analysis of Receding Horizon Planning Algorithms for Marine Monitoring | Soo-Hyun Yoo, Andrew Stuntz, Yawei Zhang, Robert Rothschild, Geoffrey Hollinger, and Ryan Smith |
11:30-11:50 |
Paper #59:
Return to Antikythera: Multi-Session SLAM Based AUV Mapping of a First Century B.C. Wreck Site
| Stefan Williams, Oscar Pizarro, and Brendan Foley |
12:00-13:30 | Lunch | Stone Lobby |
Session 2: Vision 1 | Chair: Gabe Sibley | |
13:30-13:50 | Paper #62: BORG: Building Optimal Regularised Reconstructions with GPUs (in cubes) | Michael Tanner, Pedro Pinies, Lina Maria Paz, and Paul Newman |
13:50-14:10 | Paper #32: Online Loop-Closure Detection via Dynamic Sparse Representation | Moein Shakeri and Hong Zhang |
14:10-14:30 | Paper #61: Large Scale Dense Visual Inertial Dense SLAM | Lu Ma, Juan Falquez, Steve McGuire, and Gabe Sibley |
14:30-14:50 | Pedro Pinies, Lina Maria Paz Perez, and Paul Newman | |
15:00-15:30 | Coffee break | Hall - JJR Macleod Auditorium |
Session 3: Planetary | Chair: Steven Waslander | |
15:30-15:50 | Patrick McGarey, Francois Pomerleau, and Timothy D. Barfoot | |
15:50-16:10 | Paper #42:
Design, Control, and Experimentation of Internally-Actuated Rovers for the Exploration of Low-Gravity Planetary Bodies
| Benjamin Hockman, Andreas Frick, Issa Nesnas, and Marco Pavone |
16:10-16:30 | Paper #55: Considering the Effects of Gravity when Developing and Field Testing Planetary Excavator Robots | Krzysztof Skonieczny, Thomas Carlone, William Whittaker, and David Wettergreen |
16:30-16:50 | Paper #41: Update on the Qualification of the Hakuto Micro-Rover for the Google Lunar X-Prize | John Walker, Nathan Britton, Kazuya Yoshida, Toshiro Shimizu, Louis Burtz, and Alperen Pala |
17:00-18:00 | Personal time | - |
18:00-evening | Dinner |
Thursday, June 25
Time | Activity | Note |
8:00-8:30 | Breakfast | Hall - JJR Macleod Auditorium |
Keynote 2 | JJR Macleod Auditorium | |
8:30-9:30 | Fielding Robots with Learnt Place-Specific Excellence | Paul Newman Professor, University of Oxford |
Session 4: Vision 2 | Chair: David Silver | |
9:30-9:50 | Paper #22: Wrong Today, Right Tomorrow: Experience-Based Classification for Robot Perception | Jeffrey Hawke, Corina Gurau, Chi Hay Tong, and Ingmar Posner |
9:50-10:10 | Paper #11: Beyond a Shadow of a Doubt: Place Recognition with Colour-Constant Images | Kirk Mactavish, Michael Paton, and Timothy D. Barfoot |
10:10-10:30 | Coffee break | Hall - JJR Macleod Auditorium |
Poster Session | Stone Lobby | |
10:30-12:00 | Ahmad Kamal Aijazi, Andrés Serna, Beatriz Marcotegui, Paul Checchin, and Laurent Trassoudaine Paper #12: Non-Field-of-View Acoustic Target Estimation in Complex Indoor Environment Kuya Takami, Tomonari Furukawa, Makoto Kumon, and Gamini Dissanayake Paper #13: Mobility Assessment of Wheeled Robots Operating on Soft Terrain Bahareh Ghotbi, Francisco Gonzalez, Jozsef Kovecses, and Jorge Angeles Paper #17: A Stereo Vision Based Obstacle Detection System for Agricultural Applications Patrick Fleischmann and Karsten Berns Paper #21: SPENCER: A Socially Aware Service Robot for Passenger Guidance and Help in Busy Airports Rudolph Triebel, Kai Arras, Rachid Alami, Lucas Beyer, Stefan Breuers, Raja Chatila, Mohamed Chetouani, Daniel Cremers, Vanessa Evers, Michelangelo Fiore, Hayley Hung, Omar A. Islas Ramirez, Michiel Joosse, Harmish Khambhaita, Tomasz Kucner, Bastian Leibe, Achim J. Lilienthal, Timm Linder, Manja Lohse, Martin Magnusson, Billy Okal, Luigi Palmieri, Umer Rafi, Marieke van Rooij and Lu Zhang Paper #25: Application of Multi-Robot Systems to Disaster-Relief Scenarios with Limited Communication Jason Gregory, Jonathan Fink, Ethan Stump, Jeffrey Twigg, John Rogers, David Baran, Nick Fung, and Stuart Young Paper #29: CoPilot: Autonomous Doorway Detection and Traversal for Electric Powered Wheelchairs Tom Panzarella, Dylan Schwesinger, and John Spletzer Paper #38: Aerial Vehicle Path Planning for Monitoring Wildfire Frontiers Ryan Skeele and Geoffrey Hollinger Paper #40: Taming the North: Multi-Camera Parallel Tracking and Mapping in Snow-Laden Environments Arun Das, Devinder Kumar, Abdelhamid El Bably, and Steven Waslander Paper #43: Energy-aware Terrain Analysis for Mobile Robot Exploration Kyohei Otsu and Takashi Kubota Paper #50: Learning a Context-Dependent Switching Strategy for Robust Visual Odometry Kristen Holtz and Sebastian Scherer Paper #52: Four-Wheel Rover Performance Analysis at Lunar Analog Test Nathan Britton, John Walker, Kazuya Yoshida, Toshiro Shimizu, Tommaso Paniccia, and Kei Nakata Paper #57: From ImageNet to Mining: Adapting Visual Object Detection with Minimal Supervision Alex Bewley and Ben Upcroft Paper #58: Novel Assistive Device for Teaching Crawling Skills to Infants Mustafa Ghazi, Michael Nash, Andrew Fagg, Lei Ding, Thubi Kolobe, and David Miller Paper #60: Easy Estimation of Wheel Lift and Suspension Force for Novel High-Speed Robot on Rough Terrain Jayoung Kim and Jihong Lee | |
12:00-13:30 | Lunch | Stone Lobby |
Session 5: Aerial | Chair: Steve Nuske | |
13:30-13:50 | Paper #4: Vision and Learning for Deliberative Monocular Cluttered Flight | Debadeepta Dey, Kumar Shaurya Shankar, Sam Zeng, Rupesh Mehta, M. Talha Agcayazi, Christopher Eriksen, Shreyansh Daftry, Martial Hebert, and Drew Bagnell |
13:50-14:10 | Paper #34: Robust Autonomous Flight in Constrained and Visually Degraded Environments | Zheng Fang, Shichao Yang, Sezal Jain, Geetesh Dubey, Silvio Maeta, Stephan Roth, Sebastian Scherer, Yu Zhang, and Stephen Nuske |
14:10-14:30 | Paper #47: Autonomous Exploration for Infrastructure Modeling with a Micro Aerial Vehicle | Luke Yoder and Sebastian Scherer |
14:30-14:50 | Paper #49: Long-Endurance Sensing and Mapping using a Hand-Launchable Solar-Powered UAV | Philipp Oettershagen, Thomas Stastny, Thomas Mantel, Amir Melzer, Konrad Rudin, Gabriel Agamennoni, Kostas Alexis, and Roland Siegwart |
15:00-15:30 | Coffee break | Hall - JJR Macleod Auditorium |
Keynote 3 | JJR Macleod Auditorium | |
15:30-16:10 | The Evolution of a Robotics Company | Ryan Gariepy Chief Technology Officer at Clearpath Robotics |
Session 6: Aquatic 2 | Chair: Stefan Williams | |
16:10-16:30 | Paper #33: An Overview of MIT-Olin's Approach in the AUVSI RobotX Competition | Arthur Anderson, Erin Fischell, Thom Howe, Tom Miller, Arturo Parrales-Salinas, Nick Rypkema, David Barrett, Michael Benjamin, Alex Brennen, Michael Defillipo, John Leonard, Liam Paull, Henrik Schmidt, Nick Wang, and Alon Yaari |
16:30-16:50 | Brian Claus and Ralf Bachmayer | |
16:50-17:10 | Paper #45: Towards Autonomous Robotic Coral Reef Health Assessment | Travis Manderson, David Meger, Jimmy Li, David Cortés Poza, Natasha Dudek, and Gregory Dudek |
17:10-18:00 | Personal time | - |
18:00-evening | Banquet | Trinity College’s Strachan Hall |
Friday, June 26
Time | Activity | Note |
8:00-8:30 | Breakfast | Hall - JJR Macleod Auditorium |
Keynote 4 | JJR Macleod Auditorium | |
8:30-9:30 | As the Drone Flies: The shortest path from ground to aerial autonomy | Sanjiv Singh Professor, Carnegie Mellon University |
Session 7: Underground | Chair: Chris Skonieczny | |
9:30-9:50 | Paper #51: Multi-robot Mapping of Lava Tubes | Xin Huang, Jingbin Yang, Michael Storrie-Lombardi, Lyzenga Gregory, and Christopher Clark |
9:50-10:10 | Paper #7:
Admittance Control for Robotic Loading: Underground Field Trials with an LHD
| Andrew Dobson, Joshua A. Marshall, and Johan Larsson |
10:10-10:40 | Coffee break | Hall - JJR Macleod Auditorium |
Session 8: Systems | Chair: Cédric Pradalier | |
10:40-11:00 | Paper #23: Building, Curating, and Querying Large-scale Data Repositories for Field Robotics Applications | Peter Nelson, Chris Linegar, and Paul Newman |
11:00-11:20 | Bernd Brüggemann, Dennis Wildermuth, and Frank E. Schneider | |
11:20-11:40 | Paper #14: Monocular Visual Teach and Repeat Aided by Local Ground Planarity | Lee Clement, Jonathan Kelly, and Timothy D. Barfoot |
11:40-12:00 | Paper #48: In the Dead of Winter: Challenging Vision-based Path Following in Extreme Conditions | Michael Paton, Francois Pomerleau, and Timothy D. Barfoot |
12:10-12:30 | Wrap-up | JJR Macleod Auditorium |
12:30-14:00 | Lunch | On the bus |
14:00-17:00 | Local visits and demos | UTIAS |
Evening | Personal time | - |
Organizers
- General Chair: Tim Barfoot, University of Toronto
- Program Chair: David Wettergreen, Carnegie Mellon University
- Local Arrangements Chair: Jonathan Kelly, University of Toronto
- Publicity Chair: François Pomerleau, University of Toronto
- Technical Visit Chair: Angela Schoellig, University of Toronto
2015 International Program Committee
- Peter Corke: Queensland University of Technology, Australia
- Jonathan Roberts: CSIRO, Australia
- Alex Zelinsky: DSTO, Australia
- Uwe Zimmer: Australian National University, Australia
- Salah Sukkarieh: University of Sydney, Australia
- Ben Upcroft: Queensland University of Technology, Australia
- Tim Barfoot: University of Toronto, Canada
- Philippe Giguere: University of Laval, Canada
- Steve Waslander: University of Waterloo, Canada
- Josh Marshall: Queens University, Canada
- François Pomerleau: University of Toronto, Canada
- Chris Skonieczny: Concordia University, Canada
- Arto Visala: Helsinki University of Technology, Finland
- Simon Lacroix: LAAS, France
- Christian Laugier: INRIA, France
- Cédric Pradalier: GT-Lorraine, France
- Andreas Birk: Jacobs University, Germany
- Keiji Nagatani: Tohoku University, Japan
- Kazuya Yoshida: Tohoku University, Japan
- Takashi Tsubouchi: University of Tsukuba, Japan
- Genya Ishigami: Keio University, Japan
- Miguel Angel Salichs: Universidad Carlos III de Madrid, Spain
- Roland Siegwart: ETH Zurich, Switzerland
- David P Miller: University Oklahoma, USA
- Sanjiv Singh: Carnegie Mellon University, USA
- Gaurav Sukhatme: University of Southern California, USA
- Alonzo Kelly: Carnegie Mellon University, USA
- Chuck Thorpe: Clarkson University, USA
- David Silver: Google[X], USA
- Carrick Dettweiler: University of Nebraska, USA
- Stewart Moorehead: John Deere Corp., USA
- Steve Nuske: Carnegie Mellon University, USA
- Gabriel Sibley: University of Colorado, USA
- Ross Knepper: Cornell University, USA
- Michael Jakuba: Woods Hole, USA
History of FSR
The first FSR conference was held in Canberra, Australia, in 1997. Since then the meeting has been held every 2 years in Asia, America, Europe and Australia. This will be the first time it is held in Canada.
- 2013 Brisbane, Australia
- 2012 Sendai, Japan
- 2009 Cambridge, USA
- 2007 Chamonix, France
- 2005 Port Douglas, Australia
- 2003 Mt Fuji, Japan
- Helsinki , Finland
- 1999 Pittsburgh, USA
- 1997 Canberra, Australia